Robotar och deras användning – Robotteknik , definition
Robotar , SMA drivenheter för robotar , Servodrivenheter , Industrirobotar Robotik , Förklaring av definitioner . Roboters uppdelning , hur de fungerar …
Roboten är en universell automat för att utföra rörelser, där rörelserna utförs i vissa axlar. Den kännetecknas av att den är programmerbar, utför ett stort antal handlingar, har sensorer, tentakler och verktyg.
En industrirobot är en automatisk maskin som består av en uppsättning kraftfulla mekanismer och ett programmerbart styrsystem för att utföra motorfunktioner i en tillverkningsprocess.
Obsah článku:
Blockschema för industrirobot
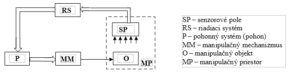
Sensorfält (SP) – sensorer informerar om tillståndet för robotens aggregat och dess arbetsmiljö. Induktiva, kapacitiva, optiska, ultraljudsbaserade, resistiva och andra system används.
Styrsystem (RS ) – ger kontroll över enskilda enheter som utför sin egen manipuleringsrörelse och även samordning med miljön, dvs. den tekniska scenen. Den tekniska scenen består av arbetsmaskiner, transportband, positioneringsutrustning eller andra robotar. Styrsystemet består av ett delsystem för mätning, styrning, kontroll, övervakning och diagnostik. Syntesen av styrkretsar säkerställer den kvalitet som krävs för drivstyrning i statiska och dynamiska tillstånd.
Framdrivningssystemet – drivningen (P) – är en enhet som består av motor, ledningar, kretsar som säkerställer att motorn fungerar korrekt, växelmekanism och ett separat arbetsorgan. Drivningen säkerställer exakt hantering i utrymme och exakt hastighet och acceleration.
Manipulationsmekanism (MM) – är en mekanisk struktur som består av en uppsättning armar. Armarna styrs oberoende av varandra och utför glidande och roterande rörelser. Hanteringsmekanismen består av ett stativ med armar, en hand eller handled, en armände med ett gripdon eller ett teknikhuvud.


Gripdon – möjliggör säker gripning av arbetsstycket och överföring av det med maximal hastighet från punkt A till punkt B.
Beroende på hur de griper är tentaklerna indelade i:
(a) med passivt grepp:
– mekanisk (flexibla käkar och viloplatser)
– magnetiska (permanentmagneter)
– vakuum (deformation sugkoppar)
(b) med aktivt grepp:
– mekaniska käftar (med hydraulisk, pneumatisk, elektromagnetisk eller elektromotorisk drivning)
– magnetisk (elektromagnet)
– vakuum eller övertryck (böjliga fingrar, vakuumkammare)
Användning av sensorer i strömdrivna motorfordon
Grundläggande indelning av drivenheter för robotar
Frekvensomriktare för robotar är indelade i:
(a) elektrohydrauliska ställdon
(b) elektropneumatiska ställdon
(c) elektriska drivenheter
– borstlösa frekvensomriktare
– ställdon
Servodrivsystem – representerar den högsta nivån av rörelsekontroll. Ställdonets uppgift är att på föreskrivet sätt sätta den drivna arbetsmekanismen i rörelsetillstånd så att arbetsmekanismen utför den tekniska operation som krävs eller säkerställer den tekniska processen med den kvalitet som krävs.
Servodrivningen består av :
– kontrollsystem
– elektrisk växelriktare
– mekanisk omvandlare
– strömförsörjning
– arbetsmaskin
– motor
Servodrifter kan utrustas med:
– asynkronmotorer
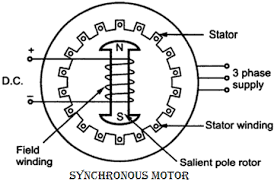
– synkronmotorer
– Stegmotorer
SMA drivenheter för robotar
Formminneslegeringar (SMA) har förmågan att ”komma ihåg” vissa, även komplicerade, former och att växelvis anta dessa former vid uppvärmning eller kylning (baserat på temperaturförändring) och därmed utföra mekaniskt arbete, men bara i en riktning åt gången. Den s.k. envägs- och tvåvägsminneseffekten hos intermetalliska föreningar som NiTi (nickel-titan), CuZnAl (koppar-zink-aluminium), CuAlNi (koppar-aluminium-nickel) m.fl. används. SMA används i robotställdon där positionen kan bestämmas genom temperaturkontroll.
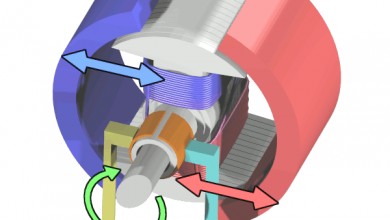
Rörelserna kan styras med elektrisk uppvärmning. SMA används bland annat för mikrorobotar, mikromanipulatorer, tentakler och artificiella fingrar. SMA-ställdon kan utformas på många olika sätt. De grundläggande typerna är: tråd, stång, band, fjäder och allmän form. Användningen av SMA-kabel i drivfunktionen visas i följande figurer.
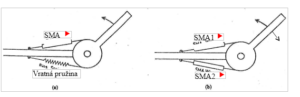
Den första drivenheten som visas Fig. (a) använder en returfjäder eller annat flexibelt material. Genom att värma SMA-tråden sätts armen i rörelse och återgår till sitt ursprungliga läge med hjälp av returfjädern. I det andra fallet visas fig. b) Det finns två ledningar SMA1 och SMA2, beroende på uppvärmningen av SMA1 och SMA2 rör sig armen åt höger eller vänster.
När det gäller utformningen av SMA-aktuatorer för robotar är följande egenskaper avgörande: storleken och repeterbarheten för returdeformationen (töjningen), temperaturområdet för SMA-fenomenet, storleken på kraften, den tillåtna belastningen, det uppnåeliga antalet arbetscykler (över 10.000), storleken på tidsresponsen och kylningsmetoden.
Generellt sett kan SMA-ställdon utöva en stor kraft över en relativt liten väg. Formens anpassningsförmåga gör det möjligt att konstruera skräddarsydda drivenheter som, utan mekaniska växlar, har ett utmärkt effekt/vikt-förhållande. De är mycket tillförlitliga och motståndskraftiga mot tuffa miljöer. De utmärker sig i området upp till 100 g och är enkla i sin konstruktion.